
25.04.2018
С учетом прочности материала ротора и величины действующих на него центробежных сил, роторы можно разделить на два вида - жесткие роторы и гибкие.
Жесткие роторы на рабочих режимах под действием центробежной силы деформируются незначительно и влиянием этой деформации в расчетах можно пренебречь.
Деформацией гибких роторов пренебречь уже нельзя. Деформация гибких роторов усложняет решение задачи балансировки и требует применения других математических моделей, по сравнению с задачей балансировки жестких роторов. Следует отметить, что один и тот же ротор на малых скоростях вращения может вести себя как жесткий, а при больших скоростях - как гибкий. В дальнейшем мы будем рассматривать только балансировку жестких роторов.
В зависимости от распределения неуравновешенных масс по длине ротора можно выделить два вида дисбаланса - статический и динамический (моментный). Соответственно говорят о статической и динамической балансировке ротора.
Статический дисбаланс ротора проявляется без вращения ротора, то есть в статике, когда ротор под действием силы тяжести разворачивается "тяжелой точкой" вниз. Пример ротора со статическим дисбалансом приведен на рис.2

рис.2 Статический дисбаланс ротора.
Под действием силы тяжести разворачивается "тяжелой точкой" вниз
Динамический дисбаланс проявляется только при вращении ротора.
Пример ротора с динамическим дисбалансом приведен на рис. 3.

рис.3 Динамический дисбаланс ротора.
Силы Fц1 и Fц2 создают момент, стремящийся развернуть ротор.
В этом случае несбалансированные равные массы М1 и М2 находятся в разных плоскостях - в разных местах по длине ротора. В статическом положении, т.е. когда ротор не вращается на ротор воздействует только сила тяжести и массы уравновешивают друг друга. В динамике при вращении ротора, на массы М1 и М2 начинают действовать центробежные силы Fц1 и Fц2. Эти силы равны по величине и противоположны по направлению. Однако, поскольку они приложены в разных местах вала по длине и не находятся на одной линии, эти силы не компенсируют друг друга. Силы Fц1 и Fц2 создают момент, приложенный к ротору. Поэтому такой дисбаланс еще называют моментным. Соответственно на подшипниковые опоры действуют некомпенсированные центробежные силы, которые могут значительно превышать расчетные и уменьшать ресурс работы подшипников.
Поскольку данный вид дисбаланса проявляется только в динамике при вращении ротора он называется динамическим. Его невозможно устранить в статике балансировкой "на ножах" или другими аналогичными способами. Для устранения динамического дисбаланса необходимо установить два компенсирующих груза, которые создадут момент равный по величине и противоположный по направлению моменту, возникающему от масс М1 и М2. Компенсирующие массы не обязательно должны устанавливаться напротив масс М1 и М2 и быть равными им по величине. Главное, чтобы они создавали момент, полностью компенсирующий момент дисбаланса.
В общем случае массы М1 и М2 могут быть не равны друг другу, так что будет иметь место сочетание статического дисбаланса и динамического. Теоретически доказано, что для жесткого ротора для устранения его дисбаланса необходимо и достаточно установить два груза разнесенных по длине ротора. Эти грузы будут компенсировать как момент, возникающий вследствие динамического дисбаланса, так и центробежную силу, возникающую вследствие несимметричности массы относительно оси ротора (статический дисбаланс). Обычно динамический дисбаланс характерен для длинных роторов, типа валов, а статический - для узких. Однако, если узкий ротор установлен с перекосом относительно оси, или деформирован ("восьмерка"), то в этом случае будет возникать трудно устранимый динамический дисбаланс. (см. рис. 4), поскольку в этом случае сложно установить корректирующие грузы, создающие нужный компенсирующий момент.
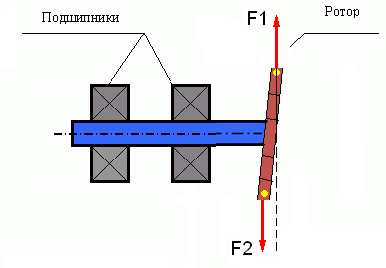
рис.4 Динамический дисбаланс узкого ротора.
Силы F1 и F2 не лежат на одной линии и не компенсируют друг друга.
В связи с тем, что из-за узкого ротора плечо для создания момента небольшое, могут потребоваться корректирующие грузы большой массы. Но при этом дополнительно возникает т.н. "индуктированный дисбаланс", связанный с деформацией узкого ротора под действием центробежных сил от корректирующих масс. (см., например, «Методические указания по балансировке жестких роторов (к ГОСТ 22061-76 Машины и технологическое оборудование. Система классов точности балансировки. Основные положения)» Раздел 10. СИСТЕМА «РОТОР - ОПОРЫ») Это заметно для узких колёс вентиляторов, у которых помимо силового дисбаланса действует ещё и аэродинамический дисбаланс. Причём надо понимать, что аэродинамическая неуравновешенность, точнее аэродинамическая сила прямо пропорциональна угловой скорости ротора, а для её компенсации используется центробежная сила корректирующей массы, которая пропорциональна квадрату угловой скорости. Поэтому эффект балансировки может иметь место только на конкретной частоте балансировки. На других частотах вращения возникает дополнительная погрешность. Тоже самое можно сказать об эл. магнитных силах в эл. двигателе, которые также пропорциональны угловой скорости. То есть устранить при помощи балансировки все причины вибрации механизма невозможно.